遙控裝備
一套完整的遙控裝備包括有一個發射器(Transmitter),一個接收器(Receiver)和幾個伺服器(Servos)。伺服器是以三芯線連接到接收器上,每一個授控制的頻道是須要一個伺服器作輸出。至於須要幾多個頻道,就由你要控制的模型來決定,例如,一個雙頻道的滑翔機就須要一個頻道來控制尾舵(Rudder),另一個頻道來控制升降舵(Elevator)。在應用時,接收器,伺服器和電池就會被安裝在模型飛機上,而發射器就會由機帥操作,用以控制在飛行中的滑翔機。機帥是以撥動發射器上的推桿或選制來控制飛機的動作。
基本原理: 現時新一代的遙控系統都是採用比例控制方式,即是說發射器上推桿的移動量與伺服器上控制桿的移動量是成正比。至於無線遙控的原理基本上與無線廣播的原理大同小異。在無線廣播中,音頻訊號是經調變在載波上,而載波的頻率是比音頻訊號的頻率高很多。這樣高頻的載波才容易由發射器的天線離開傳送到接收器中。至於調變的方案主要分為調幅(Amplitude
Modulation)和調頻(Frequency Modulation)兩種。一般來說,調頻技術比調幅技術更能有效扺抗噪音的干擾。這裏提醒大家,很多遙控機師都有一個誤解,認為調頻發射器和調幅發射器是互不干擾的。這個觀念是絕對錯的!其實只要是兩個發射器的載波頻率相同,就會互相產生干擾!所以各位機師在開啟你們的發射器前,請檢查清楚附近有沒有機師用同一個載波頻率的發射器。許多遙控設備其實可以很容易更換載波頻率,在發射器和接收器內都有一粒晶體是用以決定載波的頻率,只要你更換晶體便可改變載波的頻率。你可以到模型商店購買多一套晶體以便當遇到相同頻率的發射器時可以有得更換。請注意,一套晶體是有分發射和接收用的,發射用的是有一個Tx的標記而接收用的是有一個Rx的標記。請不要將發射的晶體放到接收器上或將接收的晶體放到發射機上。有些接收器是採用雙層轉波技術(Dual
Conversion),那麼它們的接收晶體是不可與單層轉波的接收晶體互換,就算它們有相同的標記頻率。
在無線遙控系統中,未被調變的基頻訊號是由許多個獨立的控制頻道組合而成,而每個頻道是用來代表發射器上每一個控制桿的動作。至於基頻訊號的組成,現時主要有兩個方案,第一個是脈衝位置調變(Pulse
Position Modulation)而第二個是脈衝編碼調變(Pulse Code Modulation)。脈衝編碼調變主要是配合調頻系統使用而脈衝位置調變就可以與調頻或調幅系統配合使用。脈衝位置調變的基頻訊號是由每秒有50幅的脈衝群組成,每幅脈衝群是由一連串的脈衝組合而成,而每個脈衝的寬度就代表每個頻道的控制值。每個脈衝的寬度是由1ms到2ms變化,當控制桿的位置回中時,脈衝的寬度是1.5ms。由於每幅脈衝群有20ms長,這種調變方式最多只可以有8個頻道(請注意,巿面上有些使用PCM制式的遙控裝備是有9個頻道)。至於脈衝編碼調變的原理是將每個頻道的控制值數碼化,換句話說是將控制桿的活動範圍分成1024個小部份,每個部份都可以用一個10位元的數碼代替。所有頻道的數碼就會被集合一起再加上一個核對和,然後被安放在20ms長的資訊段內再以調頻方式被傳送出去。由於脈衝編碼調變系統有錯誤檢測的功能,如果訊號在傳送中受到干擾,這種系統就比脈衝位置調變系統更有效和安全。一般來說,PCM的接收器當檢測到有外來的干擾時,就會將伺服器調較到指定的位置,這樣飛機就可以繼續在航行。這裏我們繼續提醒大家,很多飛機師都有一個錯誤的觀念還以為PPM和PCM系統是互不干擾,其實無論什麼調變系統也好,只要是如果兩個發射器的載頻相同就會產生干擾!所以希望各位機師開機前緊記要檢查清楚附近有沒有其他發射器用同一個載頻!
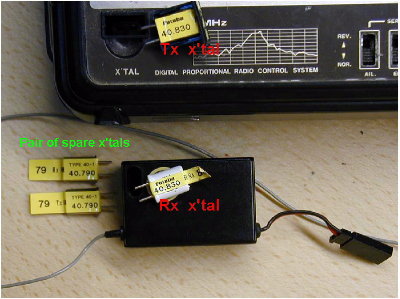
只要在發射器和接收器內更換晶體便可以改變載波的頻率
發射器: 大部份遙控發射器都有兩枝推桿,分別在控制板前左手邊和右手邊。這些推桿都能同時以水平和垂直的方向移動而每個移動方向就有對應的頻道來作控制飛機的升降,詳情請參看以下圖片。以放模型飛機為例,我們主要有兩種流行控制模式,每項模式中,發射器推桿的移動方向與飛機上授控制的翼板都有特定的關系。它們的關系就明列在以下圖表中。
| |
第一模式(Mode I) |
第二模式(Mode II) |
| 頻道 1 |
副翼(Aileron) |
副翼(Aileron) |
| 頻道 2 |
升降舵(Elevator) |
油門(Throttle) |
| 頻道 3 |
油門(Throttle) |
升降舵(Elevator) |
| 頻道 4 |
方向舵 (Rudder) |
方向舵(Rudder) |
一般來說,你可採用任何一種控制模式,其主要不同点是;如果你採用第二模式,你可以單手來操控一枝推桿從而控制一架雙頻道的飛機作升降和轉向。如採用第一模式,你就需要用兩隻手來作操控。在香港大部份機帥都是採用第一模式來作操控的。美國和加拿大地區就多數採用第二模式。有些比較先進的遙控發射器是可以貯存有關各類模型的數據,例如直升機,飛機和滑翔機,而且各頻道的控制數值可以互商混合,例如aileron/elevator混合,flap/elevator混合等等。

遙控發射器推桿的移動方向與頻道之間的關系
接收器: 遙控滑翔機接收器的體積當然越小越好,因為滑翔機的機艙一般都很狹窄。接收器體積的大小與接收器擁有多少條頻道有關,越多頻道,體積就會越大。還有PCM的接收器一般都比AM和FM的接收器大。每個接收器都有一條線形的天線,當你安裝接收器在飛機上時請緊記把天線盡量伸長以增加接收的敏感度。每個接收器都有一排三腳的插頭是用來連接到伺服器的,而其中有一個是用來接駁到電池取電。通常我們都喜歡用可再充電的NiCad電池以減少開支。
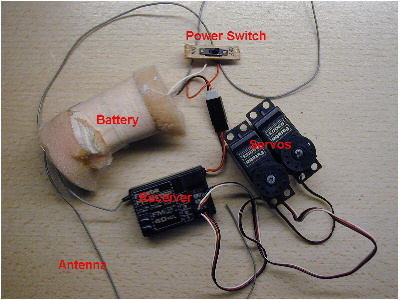
接收器,電池,開關和伺服器都是安裝在滑翔機上
選擇遙控裝備: 現時巿面上有各類的遙控裝備發售。最主要的生產商有Futaba,JR和Hitec
等。選擇一個適合的遙控裝備是很重要,以下是一些主要的考慮因素。
價錢:當然廉價是一個重要的考慮因素。一般來說,價錢是由下列因素來決定:有多少條發射和接收的頻道,AM或FM的發射制式,PCM或PPM調變制式與及發射機的功能等。最廉價的應該就是雙頻道的AM系統,而最貴的是九頻道可編程的PCM系統。
控制頻道:頻道的多少就決定在你要用來控制什麼模型。大部份的滑翔機就只需要兩個頻道,比較高級的滑翔機就會需要到6個頻道。一般來說,一個4頻道的遙控系統,例如Futaba的Skysport
4,就己經很足夠。當然如果你要玩Delta Wing的飛機,你就需要有混合的功能,那麼你就需要買要有電子混合功能的發射器,或者可以安裝電子或機械混合裝置在飛機上。
發射調變制式:AM的系統大部份都在27MHz的頻譜上工作,這個頻譜都是屬於玩遙控車和遙控船用的,所以非常濟迫。雖然AM的系統比較廉宜,但AM接收機容易受到噪音的干擾,使用時要特別小心。在香港可以買得到的FM遙控系統,有工作在72MHz,40/41MHz和35/36MHz頻譜的,現時在香港最多人使用的是40/41MHz頻譜。有些比較貴的系統會採用堪入式高頻組模的設計,例如Futaba的FF7,你只要將這個高頻組模更換,就可以轉變頻譜,例如由40MHz頻帶轉到72MHz頻帶,當然你的發射和接收晶體在新的頻譜上要相配才可。請注意在香港使用無線電遙控發射器是需要使用香港電訊管理局認可的合法遙控頻道。27Mhz頻道由26.960MHz至27.280MHz是開放給遙控模型使用而不需領牌,但由於此頻道也是CB頻道和有很多其他無線電對講機在使用,一般來說27MHz並不適合遙控飛機使用。在2005年4月,香港電訊管理局開放了18條新的遙控頻道給遙控飛機使用,其中有6條在72MHz頻帶,有8條在35MHz頻帶和4條在40MHz頻帶,使用這些頻道並不需要領有牌照。詳情請參閱以下網頁。
基頻組合制式:以玩滑翔機來說,PPM制式己經足夠使用。有些比較貴的系統就有可轉換的雙PPM和PCM功能,可以隨意轉換組合制式。由於PCM系統有防錯鎖定裝置,一般人都應為PCM系統比較安全。無錯,有了這裝置,當有干擾的時候,飛機可以繼續穩定地飛翔,但是,這未必是件好事,因為如果在授到干擾時,飛機繼續以原本的航道飛行,最後可能飛到遙遠的地方才墮毀,例如墮落在海中,那麼你就全機盡失。然而,如果沒有鎖定裝置的話,就算飛機墮落在附近的地方,殘骸也可以拾回多少!
此外,如果有鎖定裝置的話,接收器可以將錯誤隱藏,直至你發現時可能己經太遲,再沒有足夠的時間給你作反應!
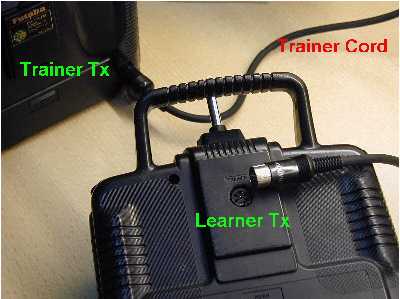
|